A Closer Look Into The latent-diffusion Repo, Do Better Than Just Looking
A Closer Look Into The latent-diffusion Repo, Do Better Than Just Looking
The two stage compress-then-diffusion boosts training efficiency dramatically, which made low computing art creations possible
For those readers who aren’t familiar with https://github.com/CompVis/latent-diffusion , please see High-Resolution Image Synthesis with Latent Diffusion Models
I would assume that you already tried or is going to try out this model-combo for your own artistic datasets
The authors already released some pretrained vq/kl regularized autoencoder models, If your dataset looks like openimages dataset, or mathematically speaking your dataset have a similar visual feature distribution with the openimages dataset, then you’re in luck, just grab one pretrained autoencoder and train your ldm with demo configs
But what if your own dataset is visually very not similar from openimages, for example, danbooru anime dataset ?
The pretrained autoencoder is not a silver bullet
Let’s give the pretrained vq-f4 a reconstruction shot at danbooru images
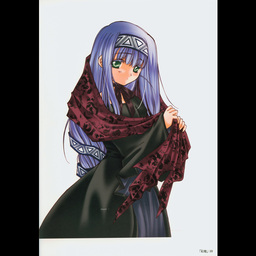



Hmmm, the eyes are a little off, but it looks kinda fine
Then the pretrained vq-f8:
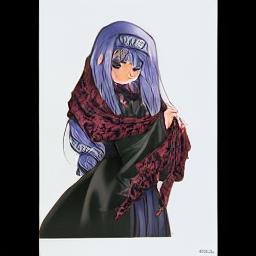

Oh no, this is giving me nightmare
So there is no need to test out the vq-f16, vq-f8 is compressing way too much
The question is: is the pretrained vq-f4 on openimages good enough for danbooru dataset ?
Well, considering I already found that re-train a vq-f4 only takes one or two epochs, it’s really not necessery to endure with the eye detail gliches, as well as the biased codebook distribution
But even if the autoencoder training takes long, I still wouldn’t chose to use the pretrained vq-f4 on danbooru dataset, not only because the ‘best reconstruction’ is not good enough, the distribution of the codebook entries are very different than the danbooru dataset as well, it means that somewhere between a dress fiber texture code and hair strand texture code, there is a squirrel fur texture code should not be used, but will be optimized during later diffusion training, I have no idea what consequence it shall make but definitely not favoring it
Selecting a proper autoencoder config
I have tried vq-f16/vq-f8/vq-f4 with the default config and the trainable parameter count are near identical due to gpu limit
Generally speaking, if you are creating 256x256 images, vq-f4 leads to a 64x64 diffusion model training, after my experiments, this is the best combo config that works really well
And after trying vq-f8, I found it hard to sustain the reconstrution quality without ramping up model abilities, with the same trainable parameters, it does’t do details well, another problem is if 64x64 diffusion model is training as fast as in 5 days on my case, spend more time on autoencoders in exchange for a easier diffusion training does not seem to be worth it
I also tried vq-f16 on my first attempt, nah… , it’s working, but after two weeks time, it doesn’t seem to be more impressive, all the gloomy details drives me mad, compared with vq-f4 + 64x64 diffusion, it’s totally not worth it, unless you wanna try 1024x1024 high resolution image generation, which makes vq-f16 + 64x64 diffusion seems proper, but that shall be a different story then
Conditioning on keypoints
https://github.com/CompVis/latent-diffusion already give examples about how to use cross attention to do conditional training, such as conditioning on image/class_label/object_center_point/depth_map etc, and I just made the 17 keypoints into a [1, 17] tensor, just as the object center point hack
def tokenize_coordinates(self, x: float, y: float, dim:int) -> int:
"""
Express 2d coordinates with one number.
Example: assume self.no_tokens = 16, then no_sections = 4:
0 0 0 0
0 0 # 0
0 0 0 0
0 0 0 x
Then the # position corresponds to token 6, the x position to token 15.
@param x: float in [0, 1]
@param y: float in [0, 1]
@return: discrete tokenized coordinate
"""
#x_discrete = int(round(x * (self.512 - 1)))
#y_discrete = int(round(y * (self.512 - 1)))
if x > (dim - 1):
x = (dim - 1)
if y > (dim - 1):
y = (dim - 1)
if x < 0:
x = 0
if y < 0:
y = 0
return int(round(x)) + int(round(y) * dim)
def coordinates_from_token(self, token: int, dim: int) -> (float, float):
x = token % dim
y = token // dim
return x, y
def build_tensor_from_kps(self, kps, dim):
kps_names = ['nose',
'eye_left',
'eye_right',
'ear_left',
'ear_right',
'shoulder_left',
'shoulder_right',
'elbow_left',
'elbow_right',
'wrist_left',
'wrist_right',
'hip_left',
'hip_right',
'knee_left',
'knee_right',
'ankle_left',
'ankle_right']
tokens = []
for name in kps_names:
x = kps[name][0]
y = kps[name][1]
if dim != 512:
x = x // (512/dim)
y = y // (512/dim)
_token = self.tokenize_coordinates(x, y, dim)
tokens.append(_token)
#return LongTensor(tokens)
return Tensor(tokens)
- A custom dataloader to load the json keypoints file
- A DummyEncoder to construct the [1, 17] tensor from keypoints
- Add keypoints option to the conditioning key for the model, modify log_images function to log conditioning keypoints as well
- Adapt the config to use keypoints conditioning and enable spartial transformer cross attention options
The complete code can be found at https://github.com/lxj616/latent-diffusion
Training the diffusion model
I decreased the model_channels to 160 (from 256) to save vram for larger batches, everything else is more or less copied from example config
This config file can be found at configs/latent-diffusion/danbooru-keypoints-ldm-vq-4.yaml in my latent-diffusion fork repo
model:
base_learning_rate: 2.0e-06
target: ldm.models.diffusion.ddpm.LatentDiffusion
params:
linear_start: 0.0015
cond_stage_key: keypoints
linear_end: 0.0195
num_timesteps_cond: 1
log_every_t: 200
timesteps: 1000
first_stage_key: image
conditioning_key: crossattn
image_size: 64
channels: 3
monitor: val/loss_simple_ema
unet_config:
target: ldm.modules.diffusionmodules.openaimodel.UNetModel
params:
image_size: 64
in_channels: 3
out_channels: 3
model_channels: 160
attention_resolutions:
- 8
- 4
- 2
num_res_blocks: 2
channel_mult:
- 1
- 2
- 3
- 4
num_heads: 8
use_spatial_transformer: true
transformer_depth: 1
context_dim: 17
legacy: false
first_stage_config:
target: ldm.models.autoencoder.VQModelInterface
params:
embed_dim: 3
n_embed: 8192
ckpt_path: /workdir/taming-transformers/logs/2022-04-25T12-37-06_custom_vqgan/checkpoints/last.ckpt
ddconfig:
double_z: false
z_channels: 3
resolution: 256
in_channels: 3
out_ch: 3
ch: 128
ch_mult:
- 1
- 2
- 4
num_res_blocks: 2
attn_resolutions: []
dropout: 0.0
lossconfig:
target: torch.nn.Identity
cond_stage_config:
target: ldm.modules.encoders.modules.DummyEncoder
params:
key: keypoints
data:
target: main.DataModuleFromConfig
params:
batch_size: 32
num_workers: 8
wrap: false
train:
target: ldm.data.custom_616.CustomTrain
params:
training_images_list_file: /workdir/datasets/danbooru_tiny.list
size: 256
validation:
target: ldm.data.custom_616.CustomTest
params:
test_images_list_file: /workdir/datasets/danbooru_tiny_test.list
size: 256
After 20 epochs of training, I suspect there is some overfitting, and keep observing until epoch 33, it became more and more obvious
The model is trying to denoise some tiny details in the last steps, only to make the details worse, this is very dataset specific, too much noise in the danbooru dataset make details impossible to refine, as well as lack of data in total
So by calculation 20 epochs is good enough, which is 2022-04-30 ~ 2022-05-04 (5 days), the vq-f4 training took a day, so this is within a week on a single 3090 Ti
Maybe I should not have filtered the dataset too heavy losing too much slightly noisy data …
Sample using pose keypoints
In short, parse the conditioning to ddim sampler, and you’ll get the conditioned output
There is a demo script at scripts/sample_pose_diffusion.py in my latent-diffusion fork repo
samples, intermediates = ddim.sample(steps, conditioning=cond, batch_size=bs, shape=shape, eta=eta, verbose=False,)
And there are many hidden tricks that ddim already have, such as inpainting, priming on a different noise latent …
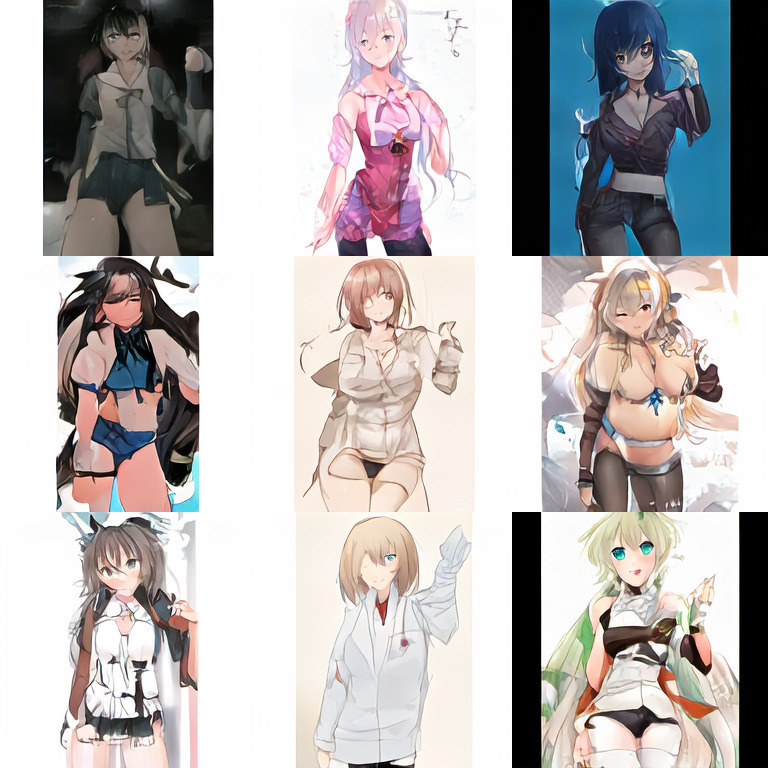
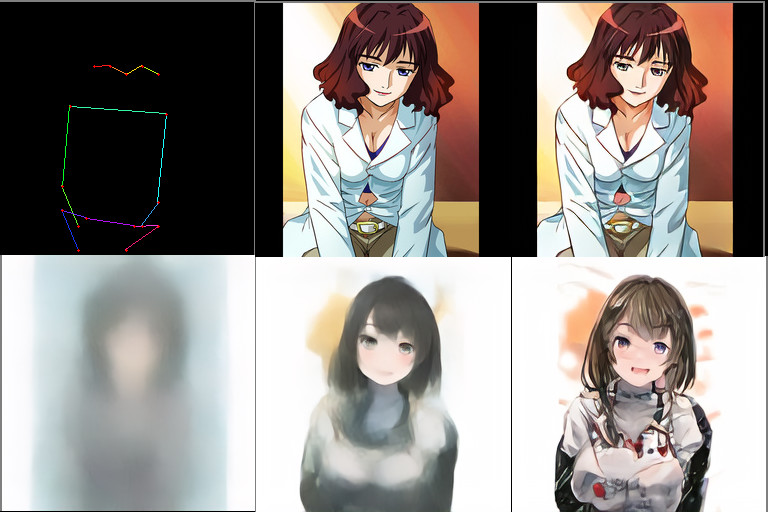
When I tried to illustrate the final output quality, I chose a real world pose example from a short video, instead of using poses from the training/validation set, this is more fun and fair to demonstrate the model capabilities
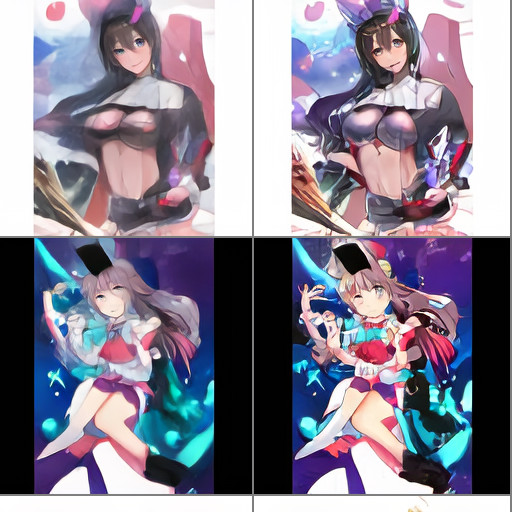
cherry-picked:

random sample:
However if you really need to generate better quality images, you can also consider the “truncation trick” similar to stylegan/biggan, but in our case is to select “the most common top N poses”
Ha, gotcha, there is no common pose in the dataset, the keypoints are way too scattered to be in common, there are total 17 points everywhere, how could they possible accidentally be the same ? The ‘pose available space’ is 87112285931760246646623899502532662132736 large(I regularized the coordinate to be within 16x16 grids each, math.pow(256, 17)), good luck finding a most common pose to get the trick done
The following pose is from the top row image in the training set, the generated output image is with similar pose but not identical with the training set image, there must be a similar image in the dataset though, if you don’t mind, selecting poses from the training set can give you better results, but not as fun as selecting real world poses to challenge the model, and to further improve the output quality by cheating, select a top common pose rather than random training set pose
Failure attempts
I tried to further clean up the danbooru dataset subset, reducing the noisy images and try vq-f8 to get details right and blazing fast, ended up worse output quality due to lack of data, details see my last post about datasets
I tried to clean up anime image backgrounds, it wasn’t accurate enough, introduces new random image feature noises, not working
I forgot to set spartial transformer in the config, find that out after many days when the log image can be clearly distinguished, my heart is broken, especially when I see the code comment after carefully debug
if use_spatial_transformer:
assert context_dim is not None, 'Fool!! You forgot to include the dimension of your cross-attention conditioning...'
if context_dim is not None:
assert use_spatial_transformer, 'Fool!! You forgot to use the spatial transformer for your cross-attention conditioning...'
from omegaconf.listconfig import ListConfig
if type(context_dim) == ListConfig:
context_dim = list(context_dim)
Citations
latent diffusion models trained using https://github.com/CompVis/latent-diffusion , modifications on keypoints conditioning
vq regularized models trained using https://github.com/CompVis/taming-transformers , no modifications
@misc{rombach2021highresolution,
title={High-Resolution Image Synthesis with Latent Diffusion Models},
author={Robin Rombach and Andreas Blattmann and Dominik Lorenz and Patrick Esser and Björn Ommer},
year={2021},
eprint={2112.10752},
archivePrefix={arXiv},
primaryClass={cs.CV}
}
@misc{esser2020taming,
title={Taming Transformers for High-Resolution Image Synthesis},
author={Patrick Esser and Robin Rombach and Björn Ommer},
year={2020},
eprint={2012.09841},
archivePrefix={arXiv},
primaryClass={cs.CV}
}